
Category: research
Kinect sensor space planning for Fusebox Gallery
this isnt happiness™ Opium, Peteski
this isnt happiness™ Opium, Peteski. Read more →
Unity3D scale factors
From the Unity 3D manual on importing meshes from 3D modeling software: Unity’s physics system expects 1 meter in the game world to be 1 unit in the imported file. If you prefer to model at a different scale then you can compensate for it here. defaults for different 3D packages are as follows .fbx, .max, .jas, .c4d = 0.01… Read more →
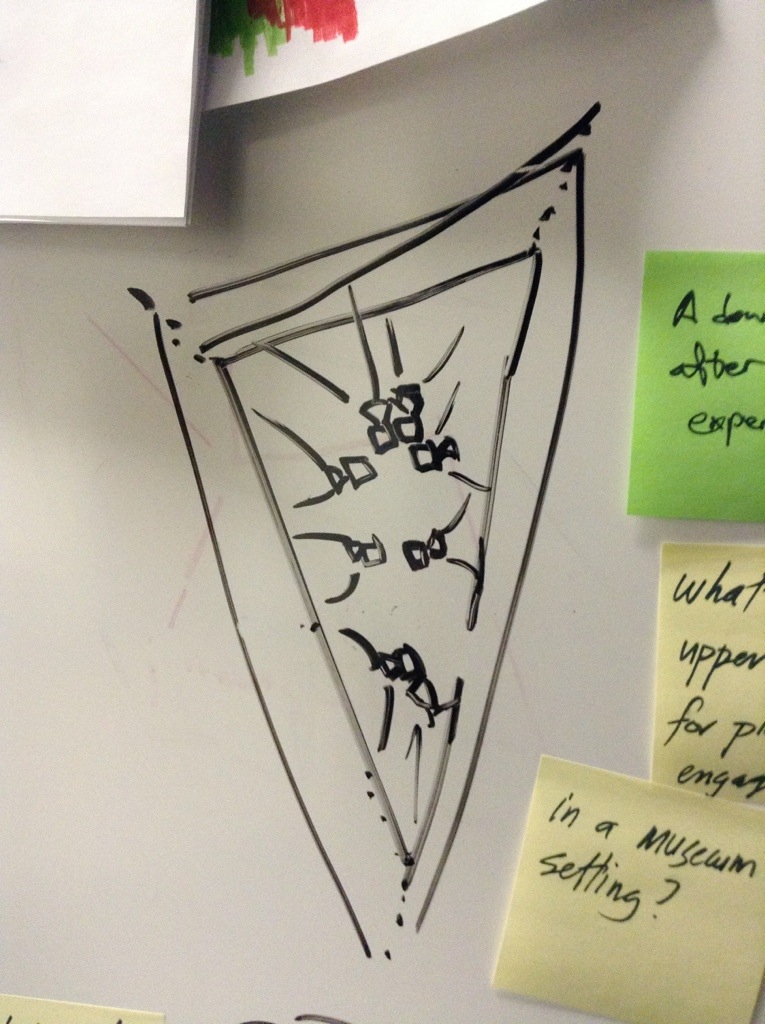
Kinect field tested floor plan
Our set of Kinects have consistently recognized a human blob within this triangular space. They have been placed on the floor at the left-hand side of this image pointed up and toward the figure. We have been using Kinect For PC 1.5. The dimensions are ± 1 inch. Read more →
Microsoft’s new Kinect is official
The new motion controller processes a stunning two gigabits of data per second to accurately read your environment. Everything about this second iteration of the Kinect is more accurate, in fact, from the number of reference points on your skeleton it monitors down to its ability to read your heartbeat. And it’s powerful enough to bring that increased fidelity to… Read more →
Kinect for Windows Sensor Components and Specifications
Kinect for Windows 1.5, 1.6, 1.7 Inside the sensor case, a Kinect for Windows sensor contains: An RGB camera that stores three channel data in a 1280×960 resolution. This makes capturing a color image possible. An infrared (IR) emitter and an IR depth sensor. The emitter emits infrared light beams and the depth sensor reads the IR beams reflected back… Read more →
Kinect Sensor on Microsoft Developer Network
The Kinect Services support the following features: Depth image including Player Index RGB image Tilt (Get and Set) Microphone Array (not in simulation) Skeleton Tracking (not in simulation) You can specify the resolution of the Depth and RGB cameras independently via a config file, as well as the depth camera mode.The config file also specifies whether you want skeleton… Read more →
Fusebox sensor and projector sketch
Fusebox gallery rough measured drawing in Google Sketchup
Rough measured drawing of Fusebox Gallery of the Denver Art Museum, accurate to within a few inches in each dimension. Thanks to our friend Christopher Coleman for sharing his rendition in Blender and the copy he made from the annotated blueprints. Teri is working up a rendition in Maya with very few polygons so that we can use it in… Read more →